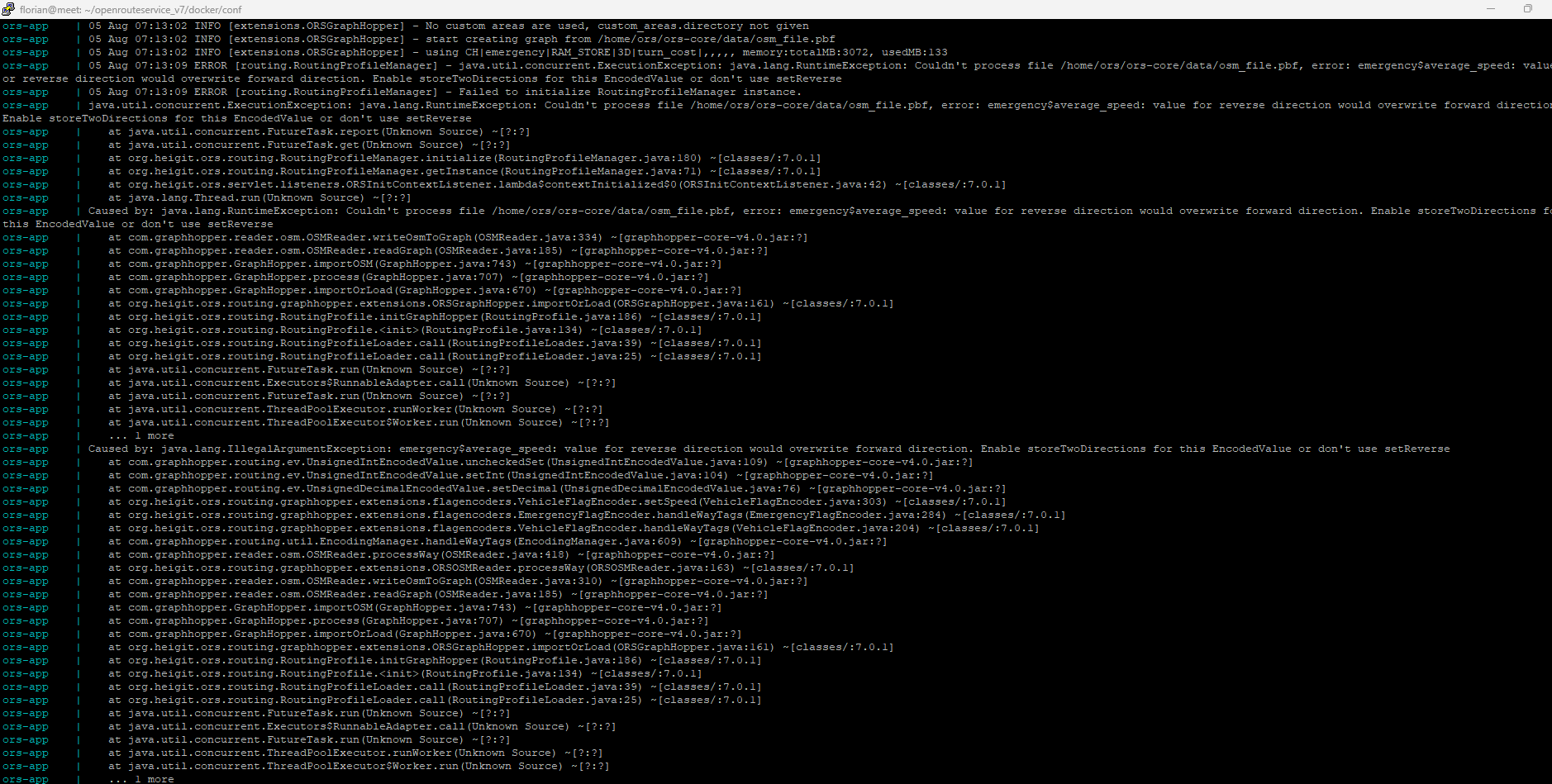
Dear ORS Team,
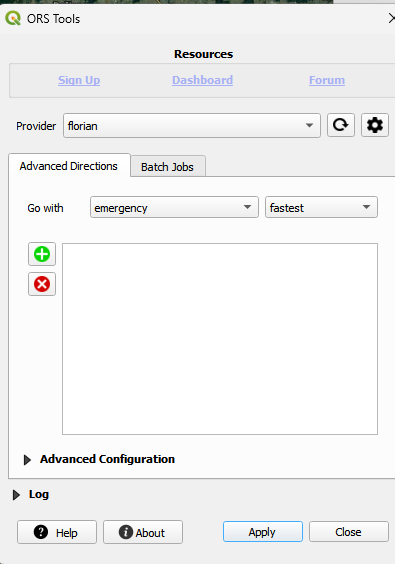
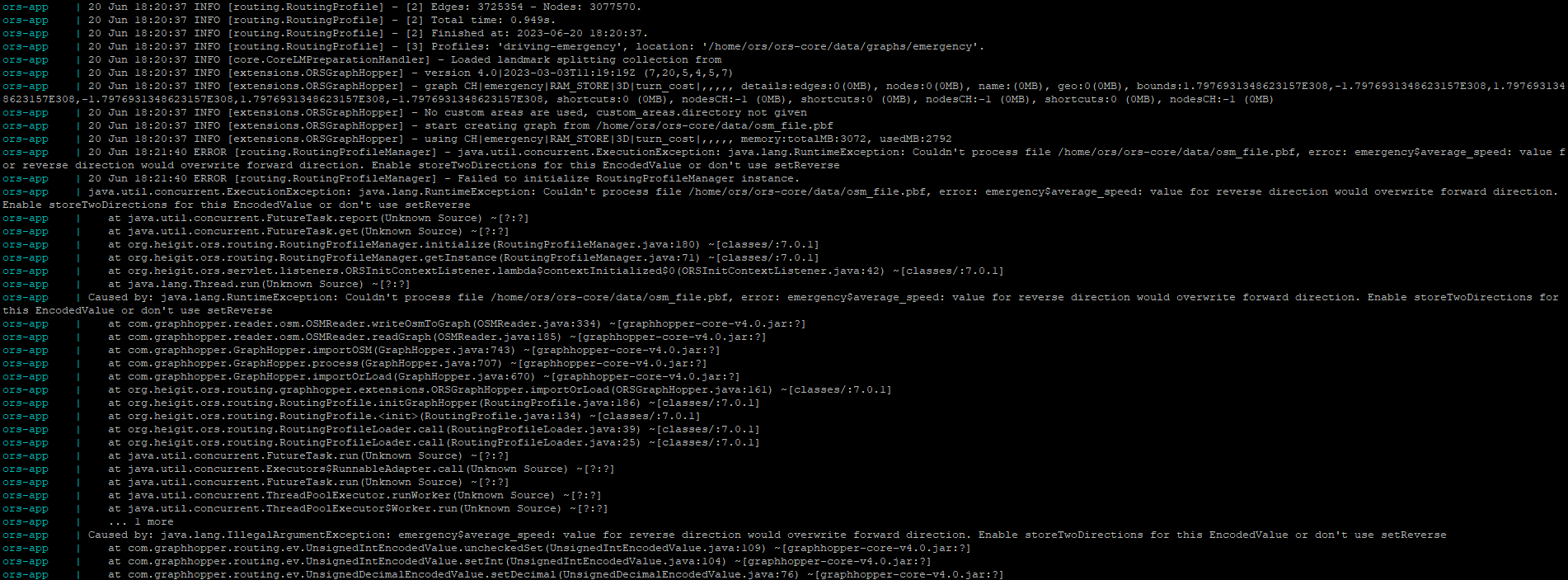
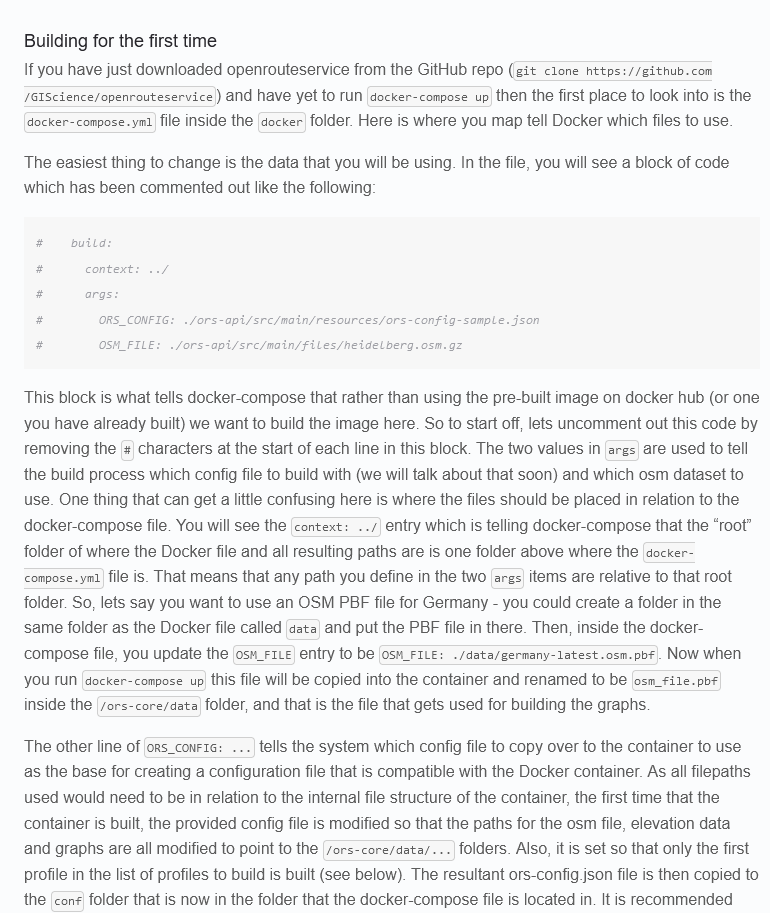
thanks for your valuable work. I am using a docker instance to allow isochrone for 3,8,12 mins driving distance car of 100 - 300 points (that come from openstreetmaps using overpass api), sometimes repeatedly in QGIS using the ORS tools plugin. I use a austria pbf file.
As shown in my web example (this qgis web client qgis 1:1 as the desktop version) when calculating the isochrones the two instances differ in some cases.
Examples:
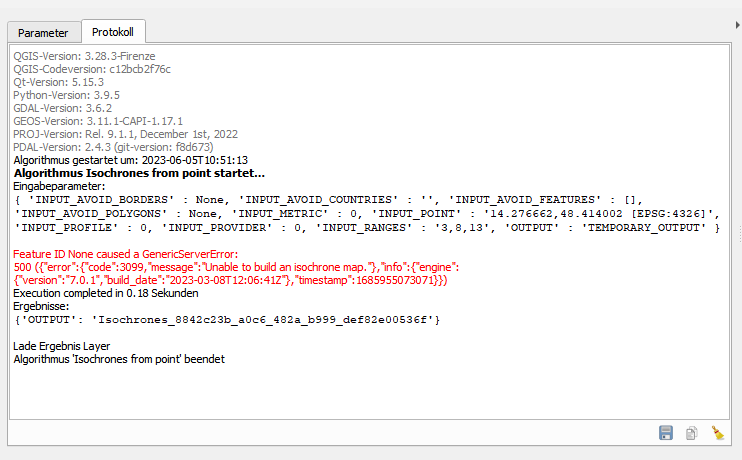
- in Kirchschlag bei Linz no isochrone is calculated at all from my self hosted instance. Transparenzlandkarte Rettungsdienst
- in Linz Mengerstraße only a versy small polygon shape is created.
Transparenzlandkarte Rettungsdienst
Also, where do I have to put which file from the GHSL to also get the estimated coverage of population of the isochrones like in the official instance?
I would really appreciate help to solve this.
Greetings Florian